UAVを用いた公共測量マニュアルに準拠した条件等に基づいて、当社で使用しているUAV、カメラ、三次元形状復元ソフトウエアの精度検証を行いました。
使用した機器等
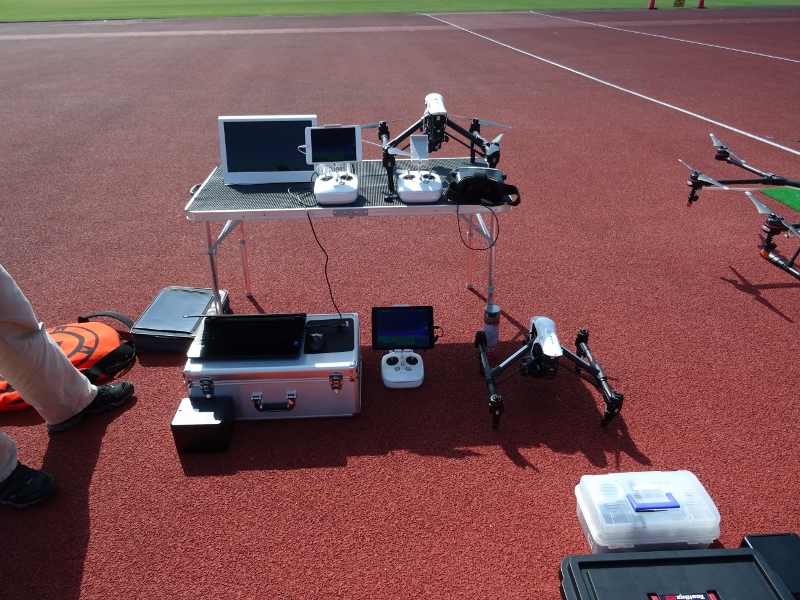
- UAV DJI INSPIRE 1 V2
- カメラ DJI ZENMUSE X5
- レンズ M.ZUIKO DIGITAL ED 12mm F2.0
- ソフトウエア Agisoft Photoscan Professional
撮影日時:2016/9/9 9:00-11:40 天候:曇 風速最大:5.4m/s
天候は曇で風もあるため雲により直射日光が遮られ、地表面の明暗が繰り返される状態で、風速が一時的に5m/sを超える事があり作業の中断も考えられました。検証には厳しい条件であったと思われます。
UAVを用いた公共測量マニュアル 第59条運用基準 7.に求められる以下の要求精度と地上画素寸法の3つの組み合わせを実施し、標定点・検証点での要求精度が満たされるか検証を行います。

撮影高度の算出
撮影高度=(地上画素寸法/使用カメラの1画素あたりのサイズ)×焦点距離
- 地上画素寸法0.01m の場合 高度 約30m (計算値 31.963m)
- 地上画素寸法0.02m の場合 高度 約60m (計算値 63.926m)
- 地上画素寸法0.03m の場合 高度 約90m (計算値 95.889m)
上記の式により算出した高度で検証を行います
標定点及び検証点の設置
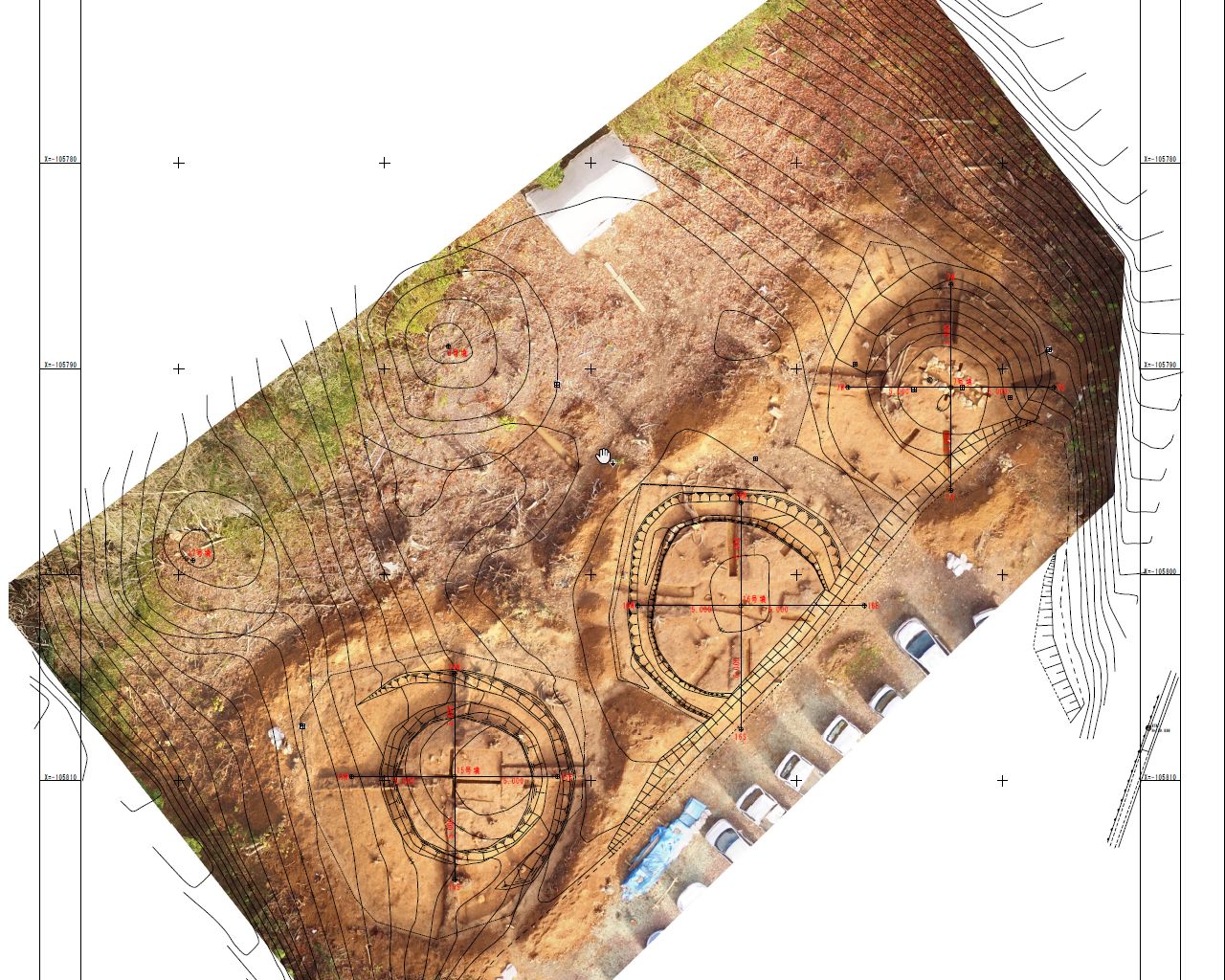
長辺約100m 短辺約50mの黄色いエリアを対象範囲とし、周囲を取り囲むように外部標定点・外部検証点を設置し、エリア内に内部標定点・内部検証点を設置しました。
今回は検証のため最大誤差0.05m以内の運用基準よりも辺長・面積辺りの設置を多く行っています。


対空標識の設置
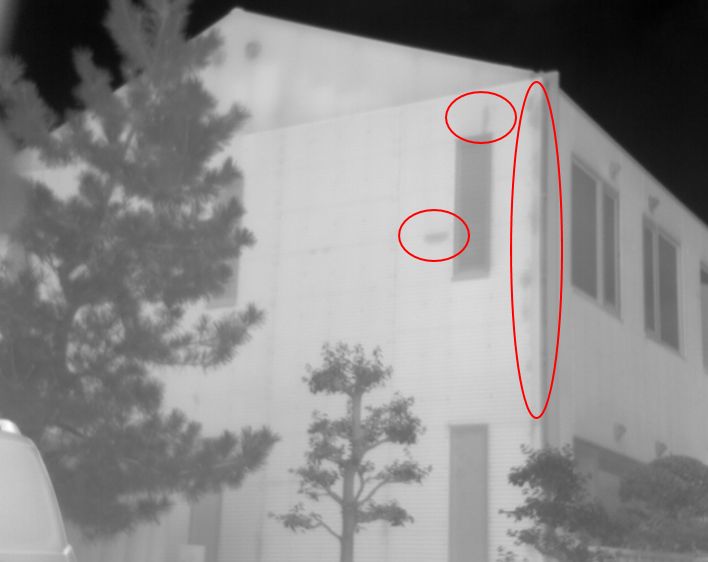
対空標識はX型と自動抽出可能な丸型のものを使用しました。自動抽出型は今回初の試みであり、事前のテストでは画面内において30画素程度に写り込んでいれば抽出が可能であったため、サイズを30m高度に合わせて作成しました。
結果として自動抽出が出来たのは1点のみで、他の9点については手動でGCPの調整を行う事が必要となりました。原因としては太陽光を反射して白とびを起こした事と、地物に対して対空標識が明るく地物に露出を合わせたため抽出パターンが見づらかったためだと思われます。通常の運用としては今まで通り、高度にあわせたサイズのX型を設置するのが確実だと思われます。

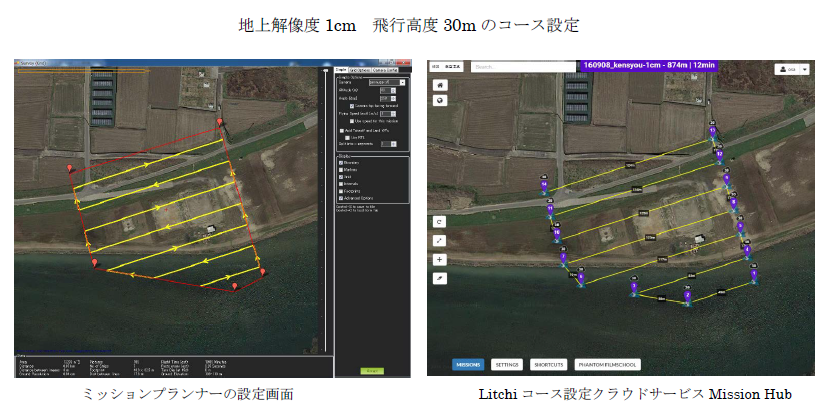
撮影計画
自動操縦による撮影は以下の手順で行いました。
- ミッションプランナーにおいて撮影範囲、カメラの設定、高度、オーバーラップを考慮しコース設定を行う。
- ミッションプランナーからテキストファイルでウエイポイントを出力、Litchiコース設定クラウドサービスMission Hubにてインポートし撮影高度や機首方向等の設定を行う。飛行時間は撮影間隔に応じた飛行速度、ミッション開始、終了までの時間や写真の露出調整の時間を充分に考慮する。
- タブレット用のLitchiに、作成したコース等をクラウドよりダウンロードし最終チェックを行い飛行する。
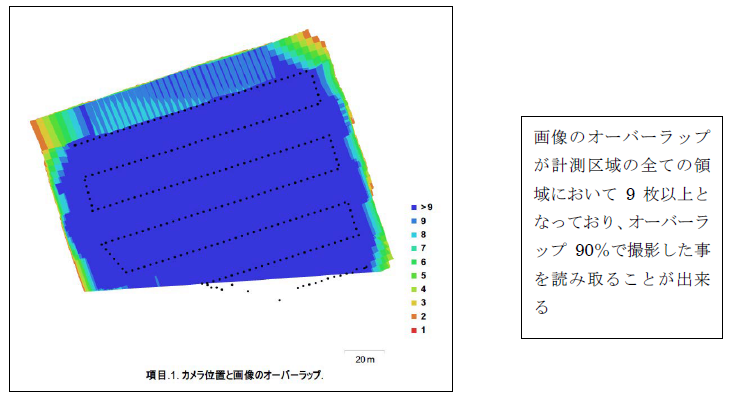
今回の検証においてはUAVを用いた公共測量マニュアルで求められている
- オーバーラップ隣接空中写真間90%・隣接コースの空中写真間60%
- 計測対象外に少なくとも1枚分の空中写真が撮影される
を満足するようにコースを設定しました。
撮影
基本的に撮影はマニュアルモードで行っています。(天候の具合によって地形の明るさの変化が大きい場合はシャッタースピード優先モードでの撮影も考慮)
Litchiでの自動飛行前にカメラを鉛直下向きにセットし計測範囲を飛行、天候・時間等を考慮してシャッタースピード、絞り、ISO等を設定を行い適正露出にしています。
カメラキャリブレーションについてはPhotoscanに付属しているAgisoft Lens にて行っています。
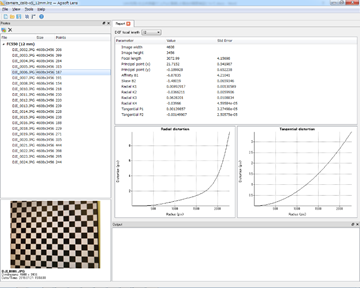
Agisoft Lensでキャリブレーションを行う場合、補正する項目についてチェックしたものは全てキャリブレーションが行われます。
Photoscan で自動キャリブレーションを行う場合、EXIFにキャリブレーションに関する項目がある場合はそれを優先して使用し、それ以外の項目はキャリブレーション補正を行う事になります。
三次元形状復元
Photoscan Professionalを用いて三次元形状復元処理を行います。
GCPを設置した観測ではカメラキャリブレーション値は固定するよりもセルフキャリブレーションを行った方が精度が良いですが、GCPを設置しない(EXIFの位置情報のみ)場合は逆転現象もあり得るのでこの辺りは更なる検証が必要となります。
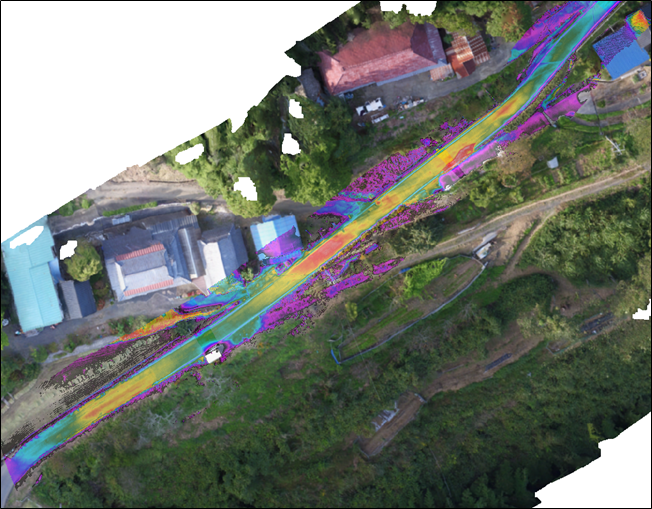
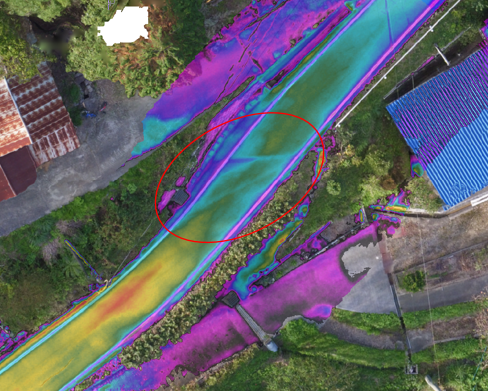
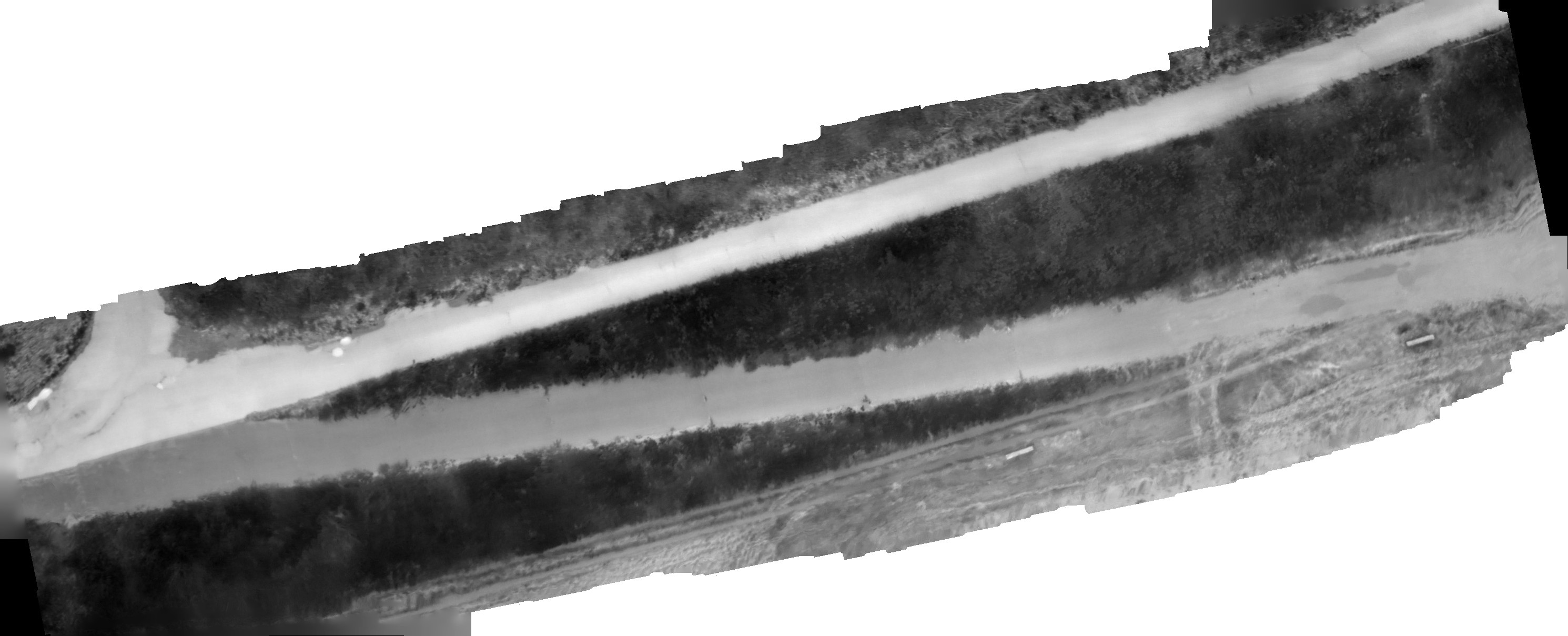
今回の処理では一番川側のコースが完全に川の上での撮影となり、このコースで撮影した写真ではタイポイントの数が圧倒的に少なく、精度の低いタイポイントを削除していくと処理が成り立たちません。このためこのコースで撮影した写真はプロジェクト内で無効に設定しました。
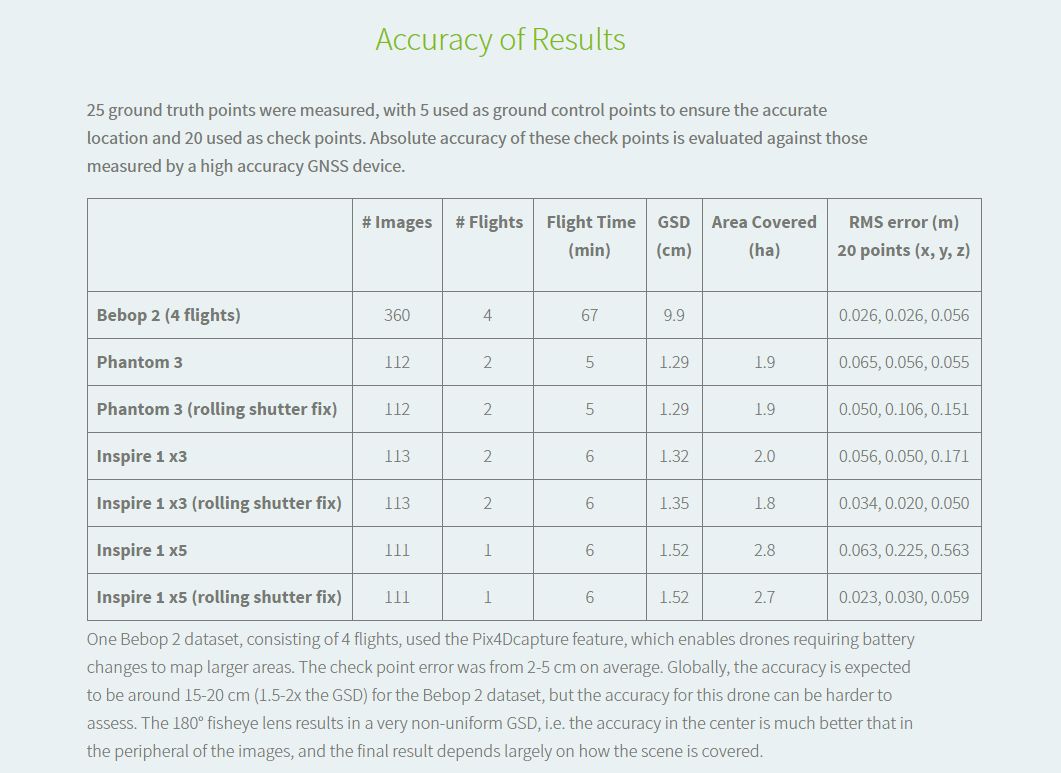
精度検証結果
カメラキャリブレーションを行い固定したものと、セルフキャリブレーションを行ったもので比較しました。全てのプロジョクトにおいて再プロジェクションエラーを0.3pix、最大誤差を1pix程度を目標に低精度のタイポイントを削除して検証を行っています。
地上解像度1 ㎝・2cm の検証については、Photoscan での解析の結果、川側1 コース分の撮影は殆ど河川上空のものとなっており、精度の高いタイポイントを発生することが出来なかったため、このコースで撮影された写真は無効に設定しています。これは公共測量マニュアルで求められている「計測対象外に少なくとも1 枚分の空中写真が撮影される」を満足するためにコース設定したものですが、計測対象内は問題なくタイポイントも発生されており検証には問題ないと思われます。

検証点(チェックポイント)についてはPhotoscanの中ではキャリブレーションのコントロールポイントとして使用していません。最終的には検証点もコントロールポイントとすれば全体の精度は向上します。
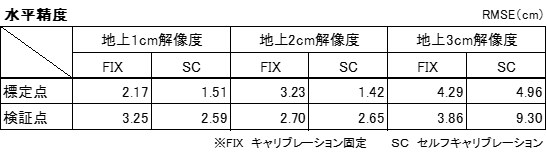
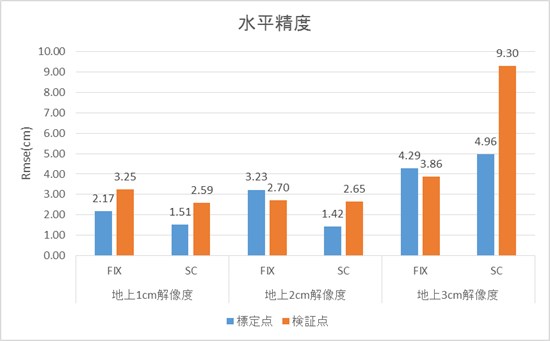
水平精度の結果
水平方向の精度については、全ての地上解像度においてUAVを用いた公共測量マニュアル 第59条運用基準 7.に求められる要求精度を満たしています。
経験上FIXした数値よりもセルフキャリブレーションを行った処理の方が精度は良いのですが、今回の結果では地上3cm解像度では逆転しFIXした方が精度が良かったです。これは検証点の1点が誤差が大きく出ていた為ですが、理由については検証できていません。また、地上解像度2cmの方が地上解像度1cmと比較しても精度が良い項目がありました。この辺りについては更なる検証が必要と思われます。
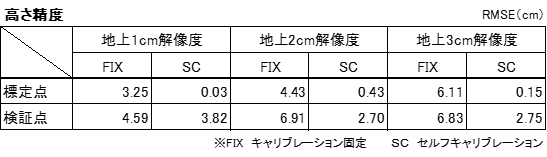
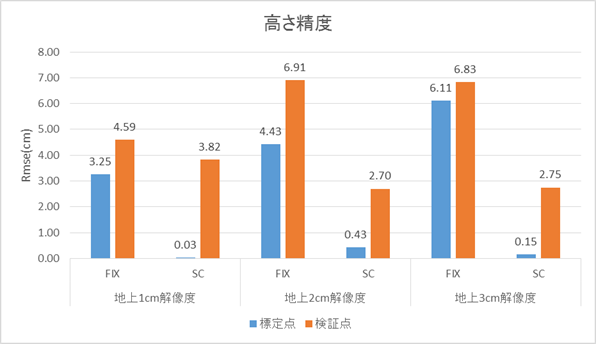
高さ精度の結果
高さ方向の精度についても、全ての地上解像度においてUAVを用いた公共測量マニュアル 第59条運用基準 7.に求められる要求精度を満たしています。
FIXした数値よりもセルフキャリブレーションを行った処理の方が精度は良いようです。
セルフキャリブレーションを行ったものは明らかに標定点での精度が良かったのですが、検証点との精度が桁違いでした。(※要求精度内) 標定点で合わせ込んだ結果が検証点へシワ寄せが来ているのかもしれませんね。
またFIXでは地上解像度が荒くなるほど精度が落ちているのに比べ、セルフキャリブレーションでは1cm地上解像度の検証点が一番精度が悪いです。この辺りについても更なる検証が必要と思われます。
行った全ての地上解像度においてUAVを用いた公共測量マニュアル 第59条運用基準 7.に求められる要求精度を満たしており、UAV・カメラ・レンズ・ソフトウエア・作業手順が問題無い事が証明できました。
ただ公共測量マニュアル内には、三次元形状復元処理アプリケーション内の各種パラメーターの指定まではありません。Photoscan においてもあるパラメーターを変更するだけで、今回行った結果の10倍以上の精度(※あくまで数値上のですが)を出力する事も出来てしまいます。
もし検証してみて精度が出ない場合は、あのパラメーターをちょいとイジって誤魔化すなんて事も通っているのかもしれませんね。
建通新聞にも載っていましたが、今後は撮影条件を緩和するように現場検証しているようです。ラップ率も地上解像度も少々過大なような気がしていましたので今後に期待です!