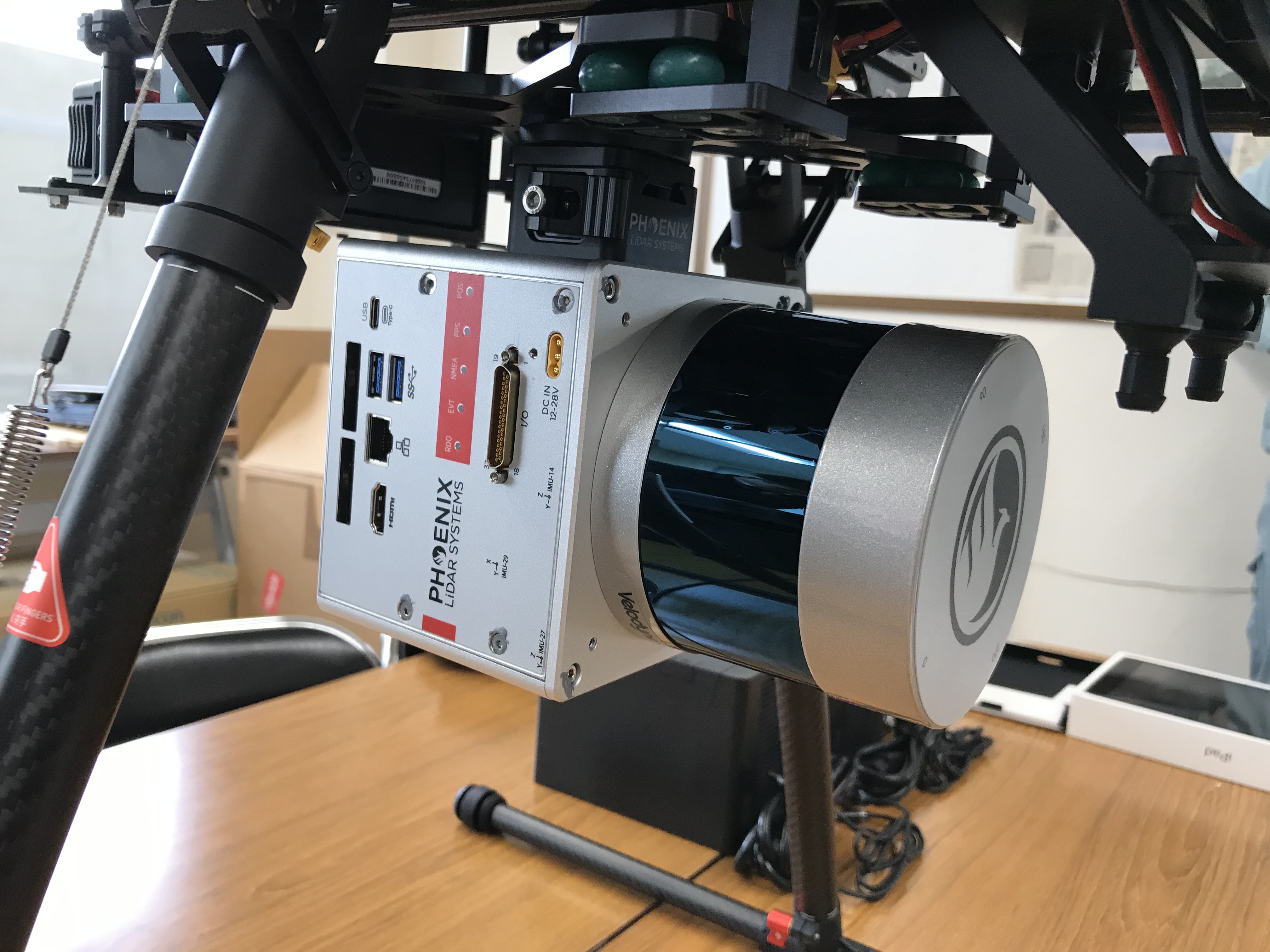
マルチプラットフォーム型レーザー(PHOENIX SCOUT-ULTRA)をSLAMで運用しています。
キャリア(背負子)へLiDARとGNSSを固定して徒歩や自転車でのデータ取得をしていますが、手っ取り早いしドローンと違って周りへ気を使わなくていいし、精度もなかなかのものです。
ただ、高価な LiDAR を背負って自転車に乗るのはかなりのプレッシャーもありますが…w

GNSSで位置座標を取得しながらのSLAMなので当然FIX率が高いほど全体の精度も向上します。
受信できる衛星数を少しでも増やすため、 GPS GLONASS Galileo BeiDou QZSSを使用できるソフトバンクのichimillの補正情報を2020年から使用しています。
また、u-blox F9P搭載したDrogger DG-PRO01RWSを使用して好きな場所で基準局を設置し、BizStation様の運用するNtrip Casterも使用出来るようになり、様々な方法で BeiDou も含めた衛星を使用する事が出来るようになりました。30個以上受信することもありますので、FIX率は今までと比べかなり上がっています。
(このDrogger DG-PRO01RWS小型・軽量・安価であり会社対応も全てにおいてすばらしいです!)
先程も書いたようにドローンが飛ばせない場所でも気兼ねなく計測が行えるのがメリットの一つなのです。
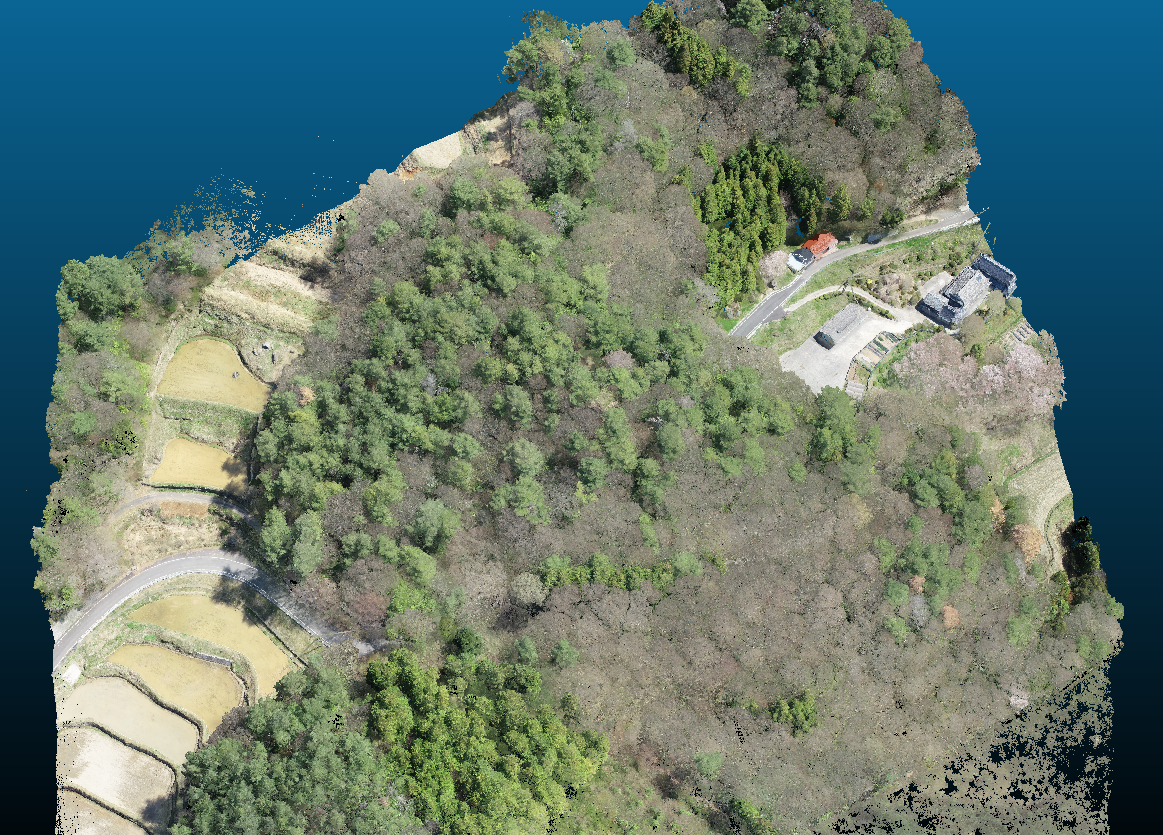
DID地区、第三者上空でも関係ありませんので市街地でのデータを取得してみました。
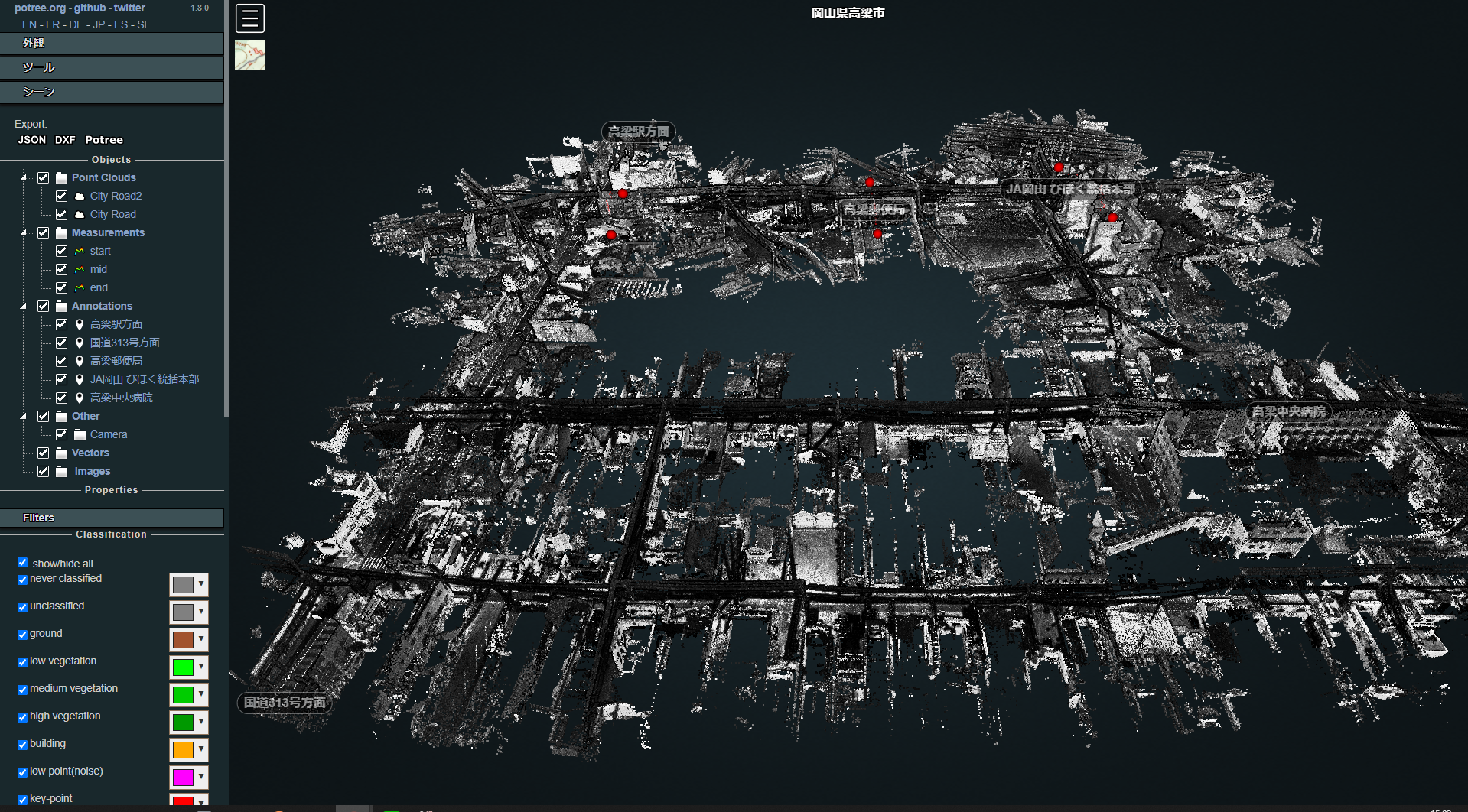
こちらでグリグリ動かして見れます Potree Viewer(かなりデータは間引いていますが重たいかもしれません)
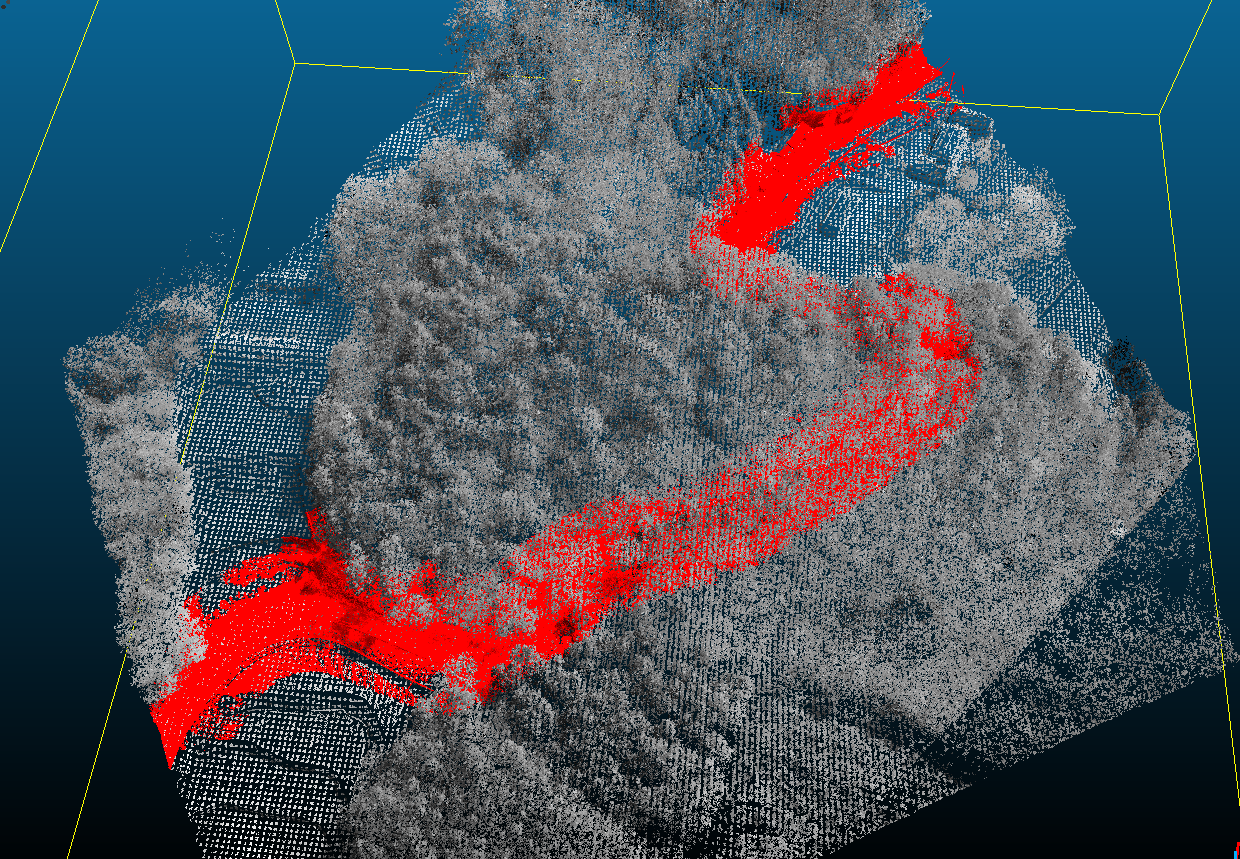
このエリアでは自転車を使用して15分✕2回の時間で観測が終了しました。途中FIXが切れたのはごくわずかなエリアだけで、検証点においては水平・垂直ともに5cm以内の誤差となっていました。
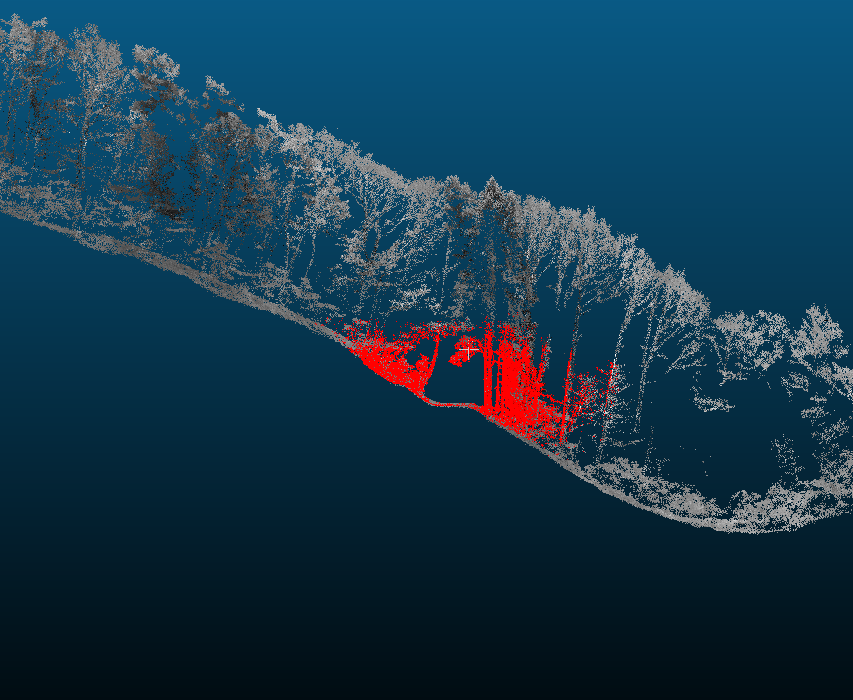
何に使用するかにもより求められる精度も違い一概に比較は出来ませんが、地上レーザーと比べても現地作業は明らかに少ないです。
このようにSLAM単体での運用も出来ますし、 ドローンからのデータと組み合わせる事で取得できない場所は少なくなるでしょう。