
UAVにセンサーを装着する場合、センサーを任意の場所に持って行くためにUAVを使用しているとの考えで運用しています。
UAVから撮影した写真からのSFMを行う場合も、カメラ(センサー)の知識が重要であるため今までもカメラについての知識や経験を多く積んできました。
同じくLIDARもセンサーとして知識を得て経験を積むため、UAV搭載に限らず運用したいと考えていました。
弊社で使用しているLIDAR 用UAVユニットはIMUが内蔵であり、GNSSアンテナやバッテリーを準備さえすればUAVに搭載するだけではなく、他の方法でも運用が可能であります。
車両等に装着する事を考えましたが、マウントの方法や振動対策等で頭を悩ませる事が予想されるため、他の方法として背負子(しょいこ:背負型キャリア)にLIDARユニット・GNSSアンテナ・バッテリーを装着して自転車でのデータ収集を行いました。
車両での運用を考えた場合、LIDARの計測速度(5m/s 時速18km/h)での走行は他の一般車両に迷惑になりますが、自転車での走行ではちょうど良い速度であり一般車両に迷惑がかかることはありません。

UAVで運用する場合と大きく違うのは、建物等があるためGNSSの補足が厳しく、またマルチパスの影響を受けやすい事です。
PPK後処理の解析の中で計算方法を変更したり、初期姿勢(イニシャライズ)の方法を変更することで、ある程度満足のいく結果を得られるようになりました。
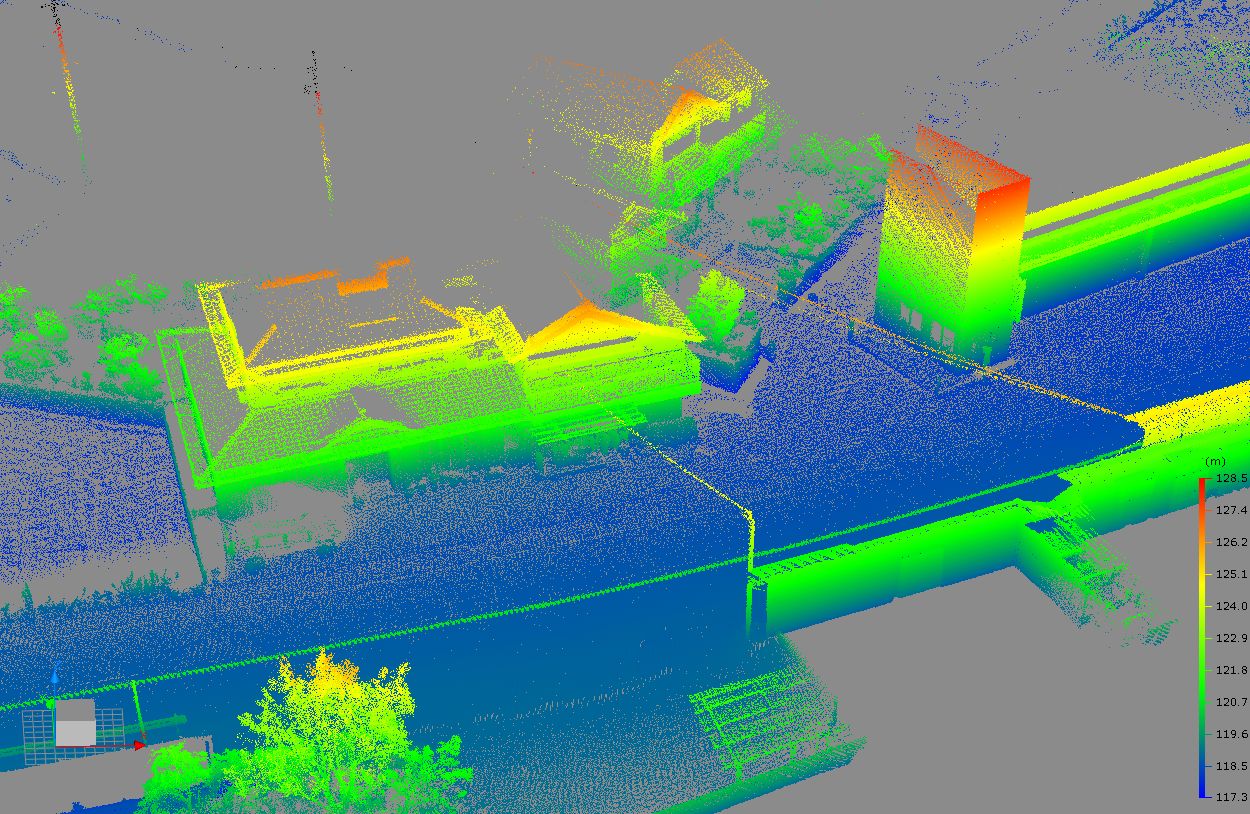
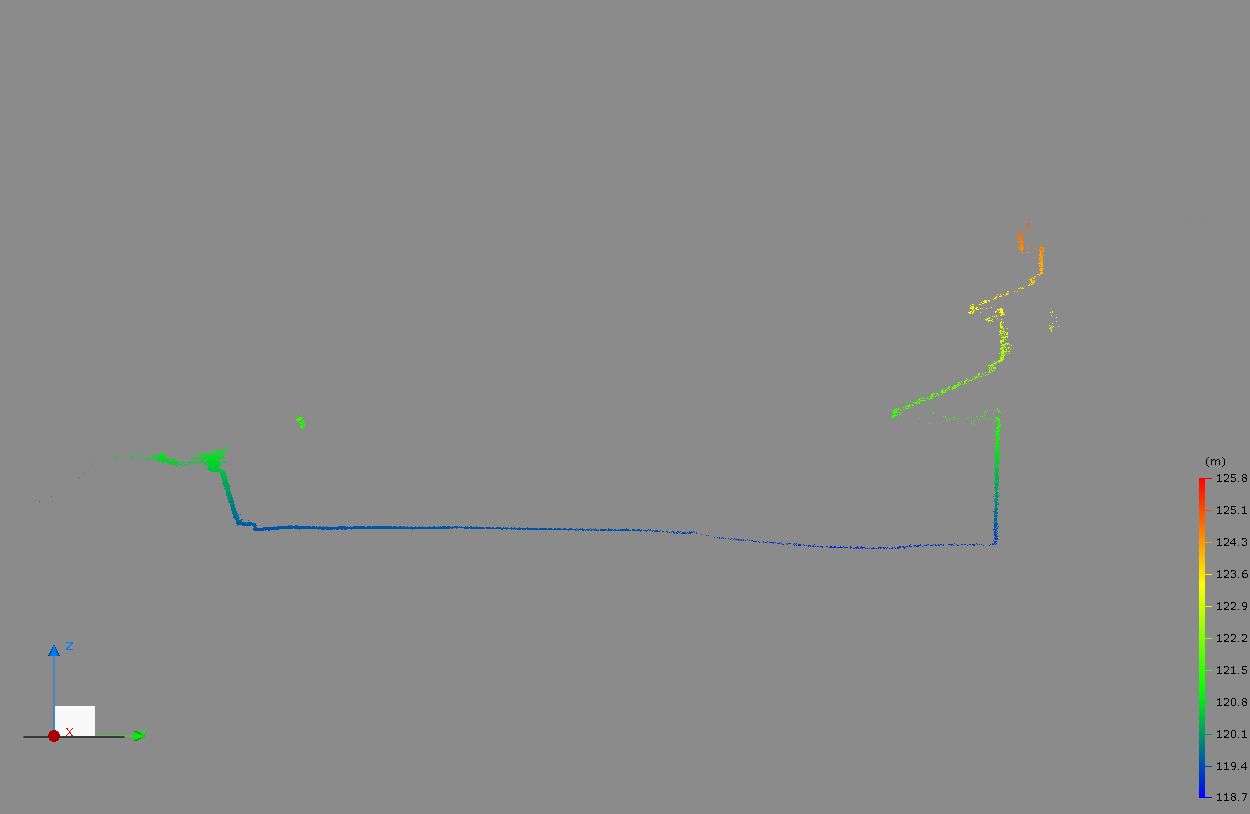 任意の断面抽出
任意の断面抽出

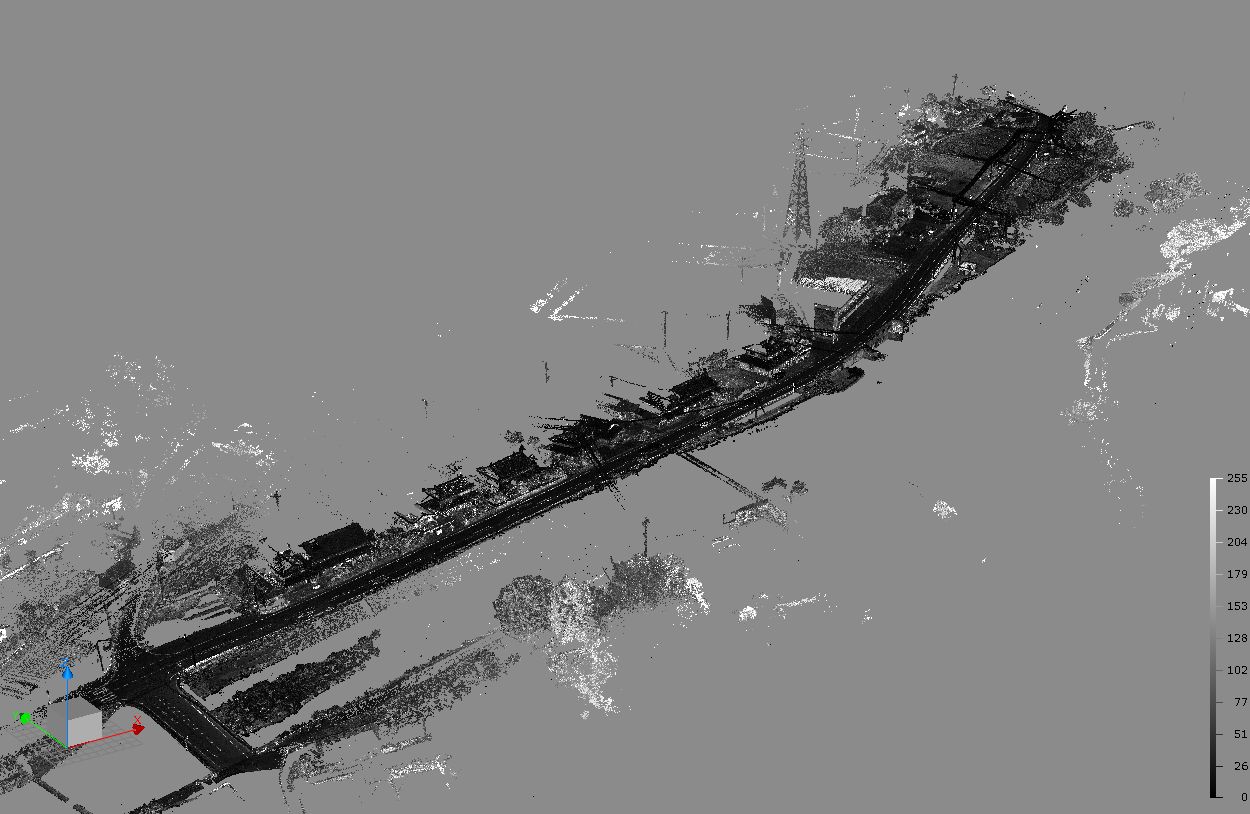
上記のようなデータが走行時間7分程度で得られました。正直驚きました!
上からはUAV、下からは自転車を使用する事で片方だけでは得られなかったデータを取得することが可能になります。
また、大型になってしまうLIDAR用のUAVの飛行はリスクを伴うため、場所に応じて自転車等の簡易MMSを使用してコース設定を綿密に行えばある程度のデータ取得が可能となる事がわかりました。